机床配置文件编辑器
本文档详细介绍机床配置文件编辑器各部分的界面和功能,内容组织清晰,方便查阅。
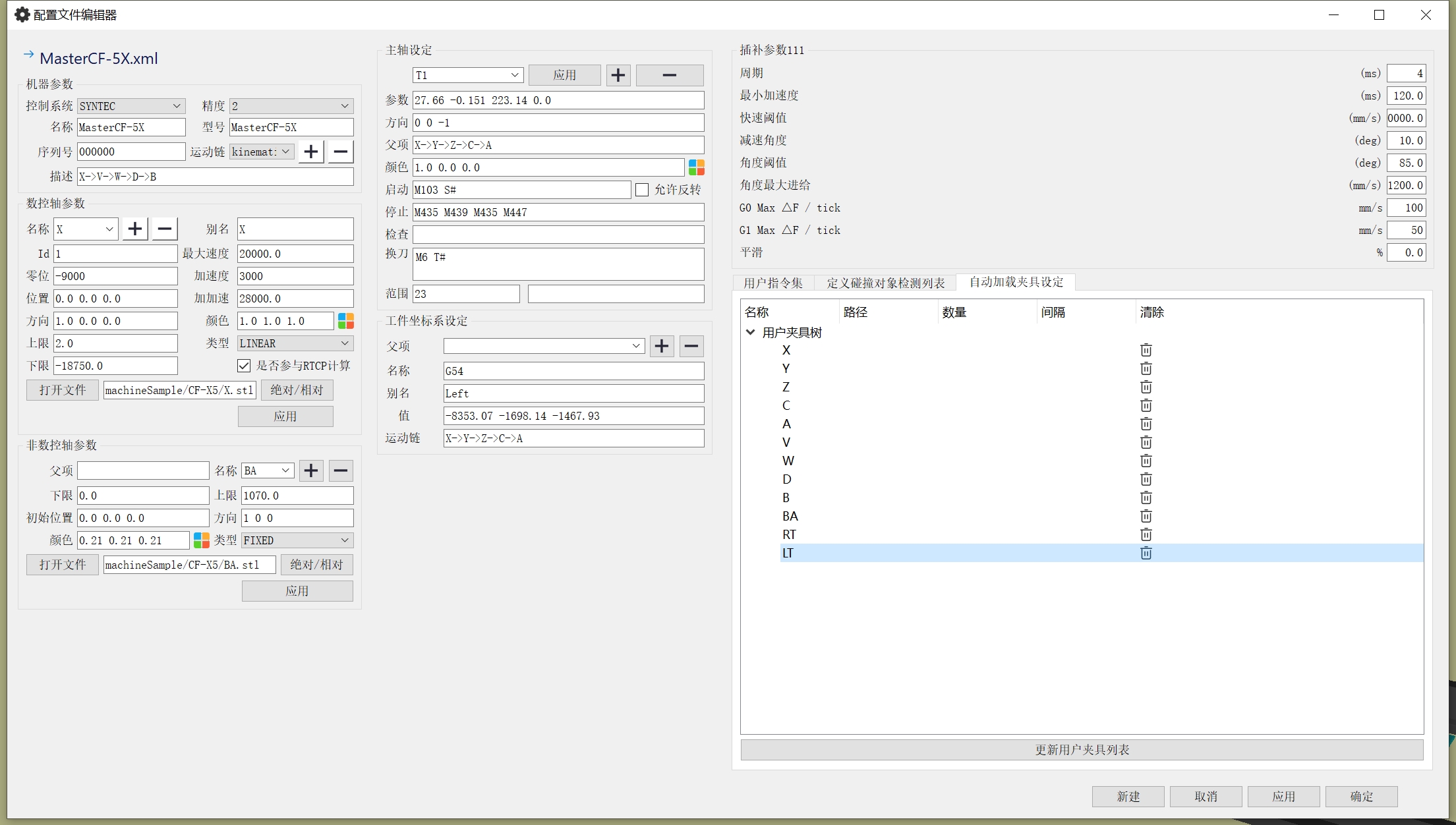
1. 主界面
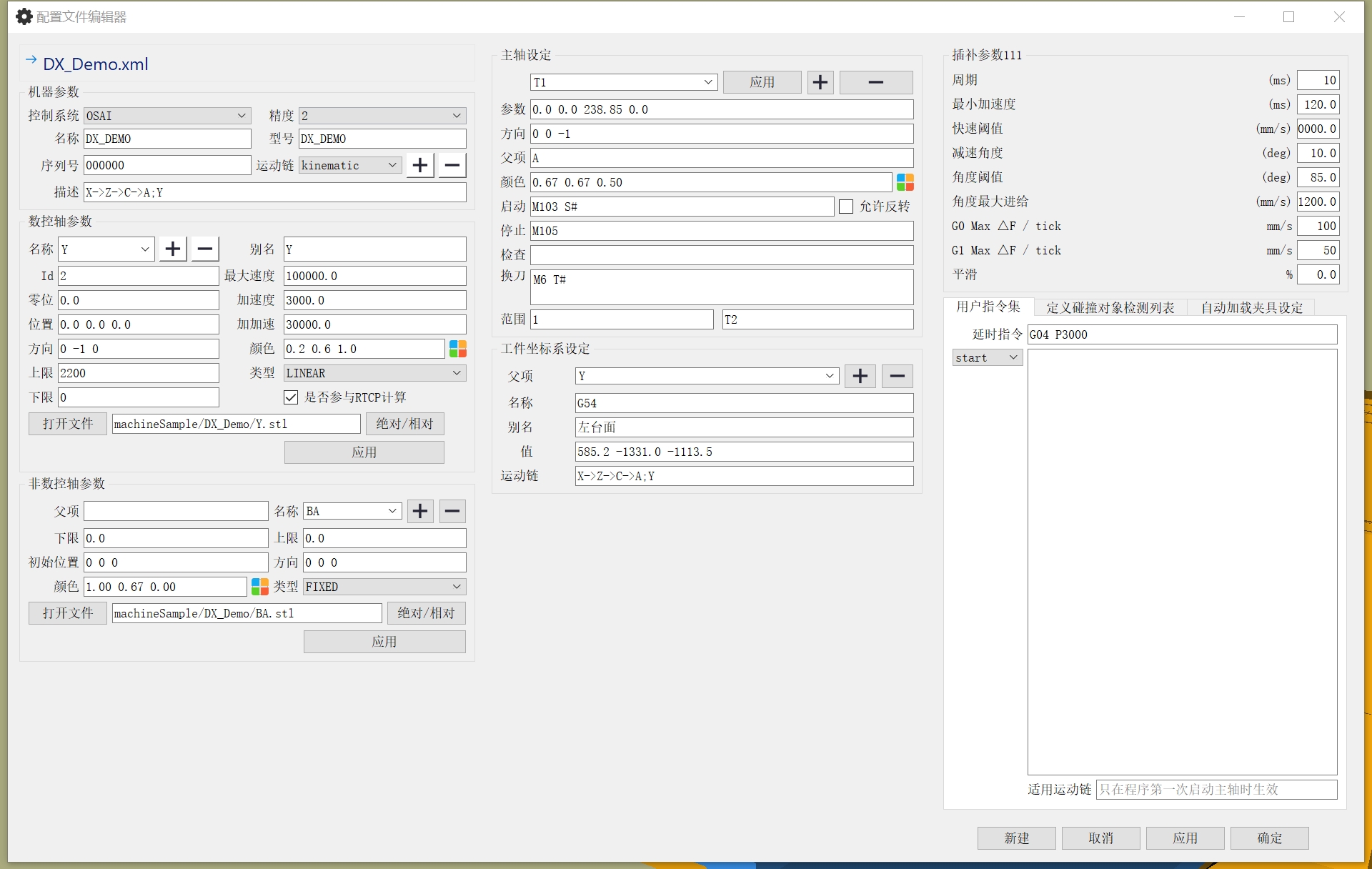
2. 机器参数
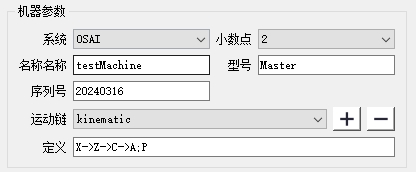
说明: 运动链的定义是非常重要的,它定义了设备的运动学。串联结构 → 连接, 并联结构 ; 连接
- 系统:机器使用的系统
- 小数点:定义轴坐标小数点后的位数(例:
X100.23或X100.234) - 名称:机器名称
- 型号:机器型号
- 序列号:机器的序列号
- 运动链:机器所使用的运动链
- 定义:运动链的具体定义.点击:运动链和轴id
3. NC轴定义
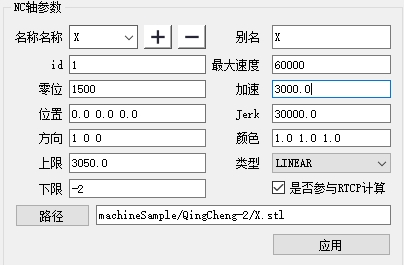
- 名称:机械轴名称,应与机器上的轴名称一致
- 别名:理论名称,用以匹配后处理器生成的G代码中的轴名称
- id:轴Id,必须准确设定.点击:运动链和轴id
- 最大速度:轴允许的最大移动速度
- 零位:机器回零时的位置
- 加速:轴允许的最大加速度
- 位置:轴3D模型的初始位置
- Jerk:轴允许的最大加加速度
- 方向:轴的运动方向
- 颜色:轴3D模型显示的颜色
- 上限:轴运动的上限
- 下限:轴运动的下限
- 类型:轴的运动类型(线性轴或旋转轴)
- RTCP计算:是否参与RTCP计算.此功能仅在双五轴头机型需要设定,其它机型默认勾选
- 路径:轴模型的存放路径.建议:采用相对路径
4. 非NC轴定义
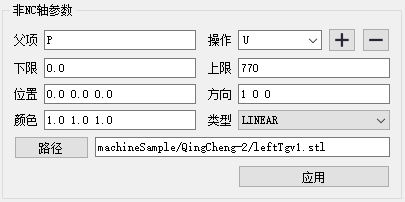
- 父项:此非NC轴的安装轴
- 名称:理论名称,用以匹配后处理器生成的G代码轴名称
- 下限:轴运动的下限
- 上限:轴运动的上限
- 位置:轴3D模型的初始位置
- 方向:轴的运动方向
- 颜色:轴3D模型显示的颜色
- 类型:轴的运动类型(线性轴或旋转轴)
- 最大速度:轴允许的最大移动速度
- 零位:机器回零时的位置
- 加速:轴允许的最大加速度
- Jerk:轴允许的最大加加速度
- 路径:轴模型的存放路径
建议:采用相对路径
5. 主轴定义
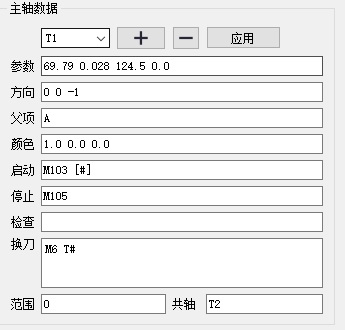
- 参数:主轴刀具的安装点,所对应数控系统的RTCP值,每组数据包含4个值(X、Y、Z和角度偏置)
- 方向:刀具安装后的默认指向(使用默认值)
- 父项:主轴的安装轴(双五轴头机型必须完整填写)
- 颜色:安装刀具显示的颜色
- 启动:主启动指令,
#符号将会被替换为转速 指令必须是唯一的 不可与其它主轴的指令相同
例如:若1号刀具转速为10000,格式:M103 [#]最终输出为M103 [10000] - 停止:主轴停止指令 不可与其它主轴的指令相同
- 检查:主轴转速到达的检查指令 不可与其它主轴的指令相同
- 换刀:可换刀主轴使用的换刀指令(必须以M开头)
- 范围:可换刀主轴的换刀范围.不换到主轴范围:1 换刀主轴按实际设定
- 共轴:针对双出主轴,定义共轴的两个主轴
6. 工件坐标系
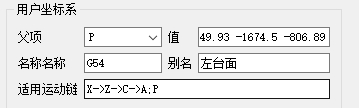
- 父项:工件坐标系所依赖的(非)NC轴(可留空)
- 值:工件坐标系相对于世界坐标系的偏置值
- 名称:如G54 - G59
- 单台面:G54
- 双台面:
- 左台面:G54
- 右台面:G55
- 别名:工件坐标系的显示名称
- 运动链:工件坐标系所在的运动链 此处的运动链必须与“机器参数”中定义的保持一致
7. 插补参数
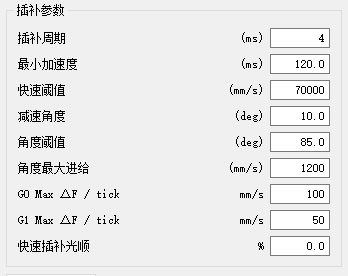
- 插补周期:软件执行插补的时间间隔
说明:大多数数控系统的插补周期:2ms 默认值为2ms,建议不要超过10(单位:毫秒)
- 快速阈值:机床执行G0指令时允许的最大速度
- 未解释部分:使用默认值,客户无需修改
8. 定义碰撞对象
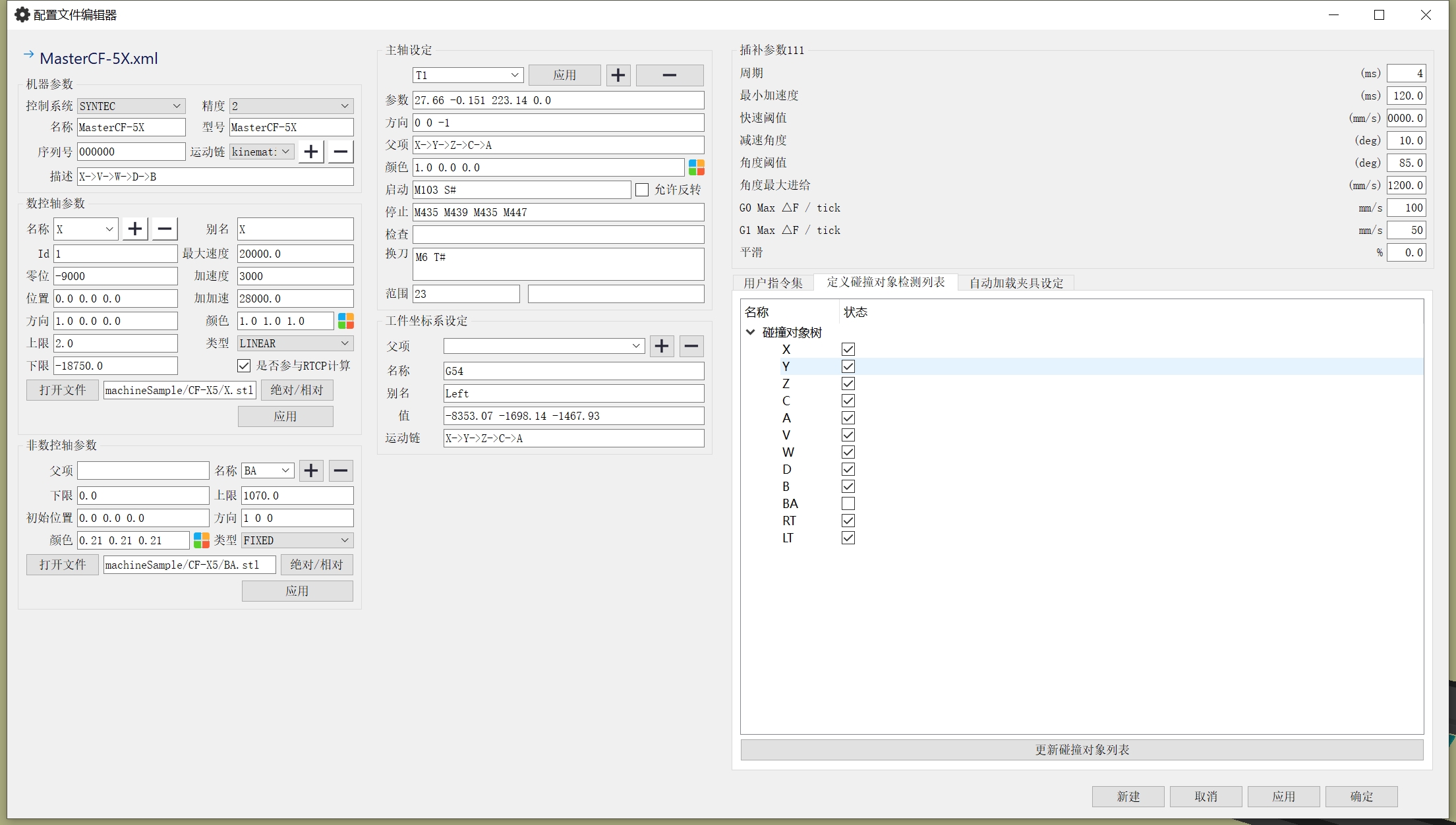
当以上参数都已经设置好之后.点击更新碰撞对象列表,它定义了哪些对象会被做碰撞检测.一般来说机床的机架是不需要做碰撞检测的,特殊机型需要对机架进行碰撞检测的,需要在模型导出时,确认机架模型不与其它模型接触,否则会无线出发碰撞提示
9. 自动加载夹具
当以上参数都已经设置好之后.点击更新用户夹具列表,软件会对非NC轴自动设置加载夹具.核对需要加载夹具的非NC轴.需要设置那里就双击那里,不需要,则双击删除图标